◆ST-22TVが壊れたのでLCDパネルだけでも使えないかと思い
M.NT68676搭載のLCDコントローラに繋いでみました。
1.パネルの写真と諸元
◆写真


◆パネルの諸元を確認するのに下記サイトが参考になりました。
panelook.com
◆ネットで探すと似たような下記がヒットしました。
①型番 RUNTK0001ZAPN PANDA製
②サイズ 21.5インチ
➂解像度 1920 x 1080
④接続方法 LVDS 2ch 8bit
2.LCDコントローラ
◆今回のパネルに対応していそうなコントローラを下記より購入
①HDMI VGA DVI Audio LCDコントローラ基板 M.NT68676;
②電源は12V 2A
➂対応 21.5インチ 23インチ 23.6インチ 27インチ液晶パネル
④解像度1920x1080 30ピン LVDS

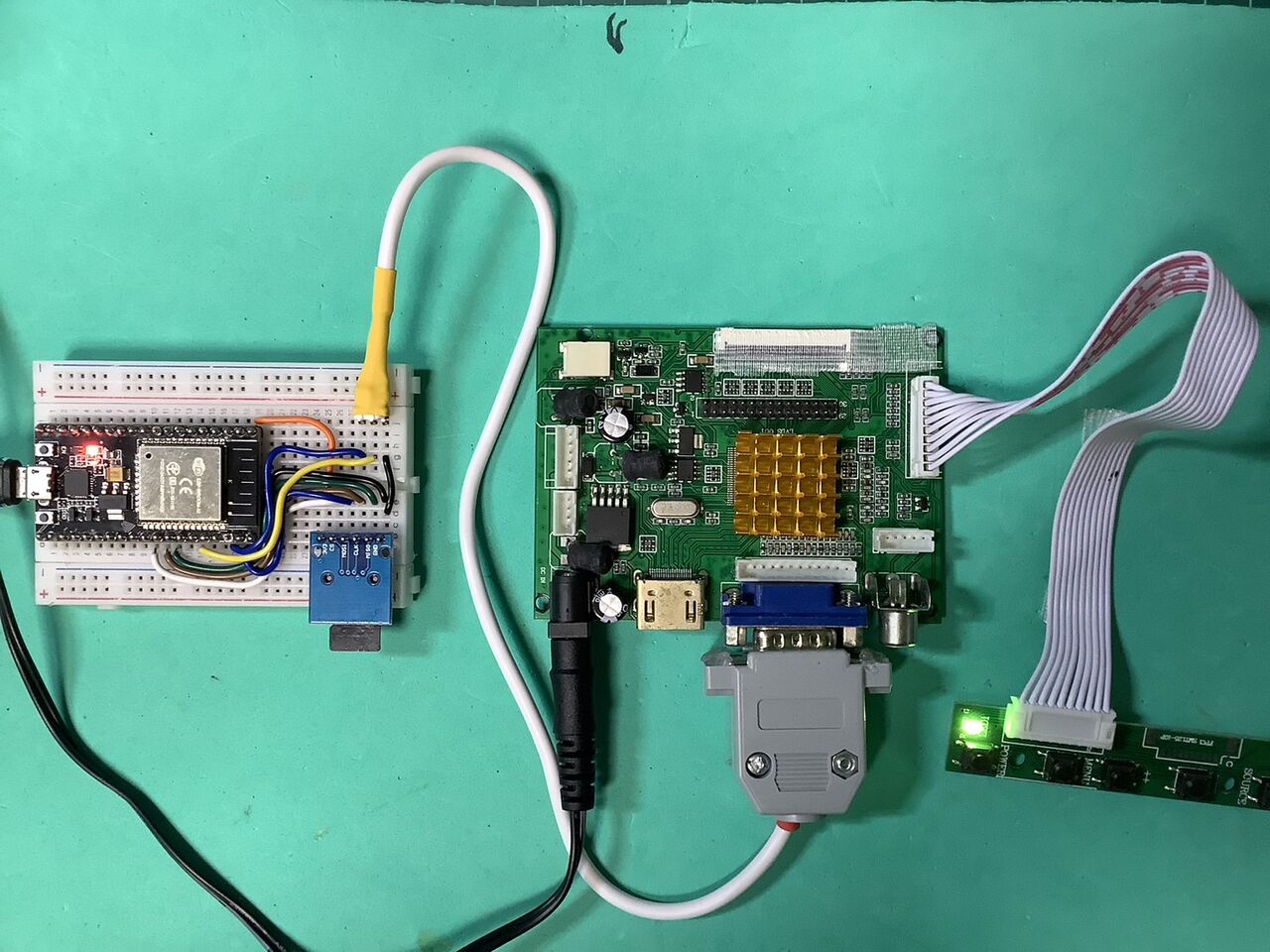
3.組み立て
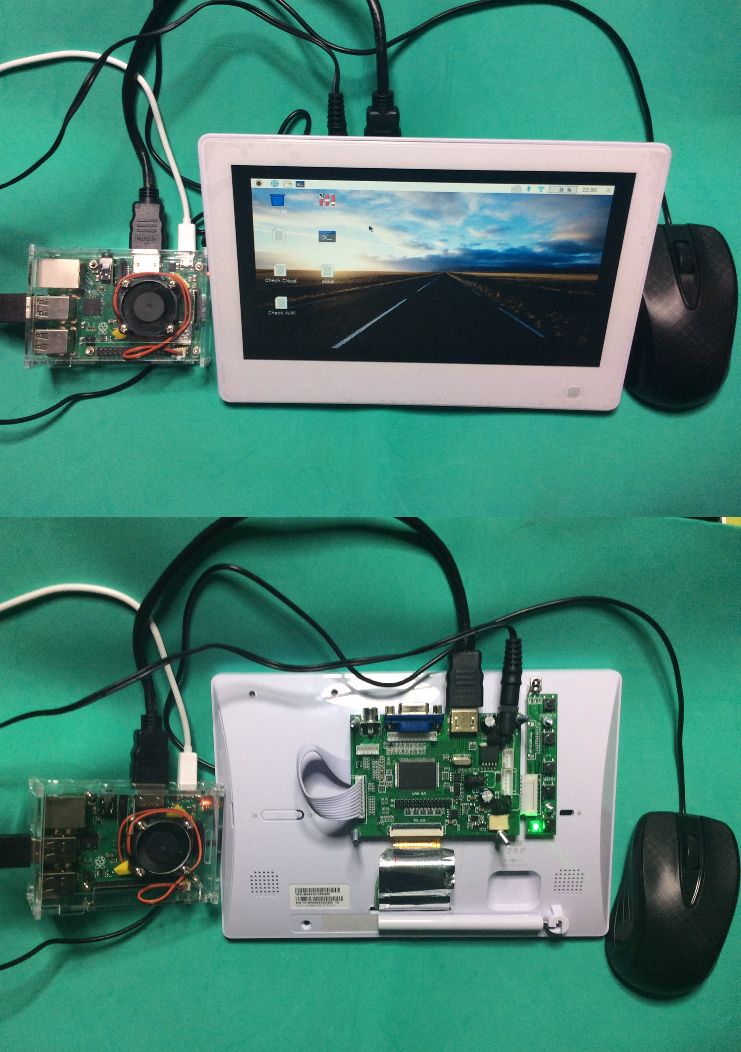
①壊れた基板を取り去り新しい基板を取り付けました。
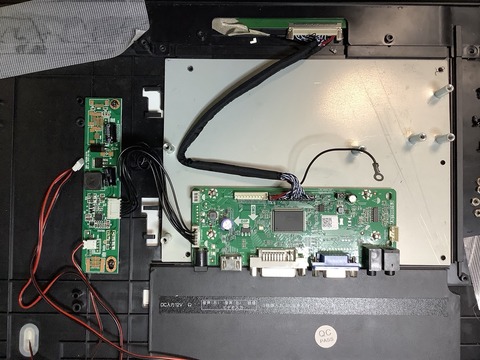
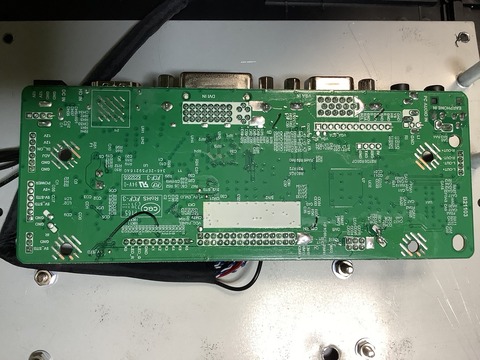
②配線確認のために表・裏の写真を撮りました。

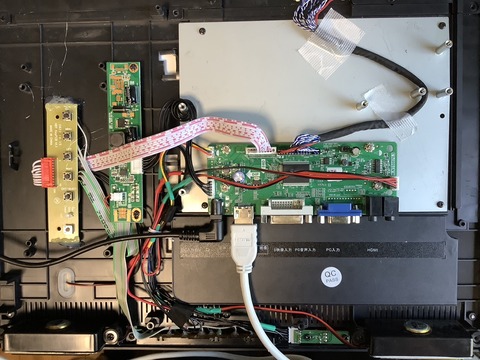
➂基板以外のスピーカー、キースイッチ、インバータ基板、IR受信機、LEDは
TVの物を流用し、組み上げました。
◆キースイッチは、元々のTVの物とパラ接続しました。
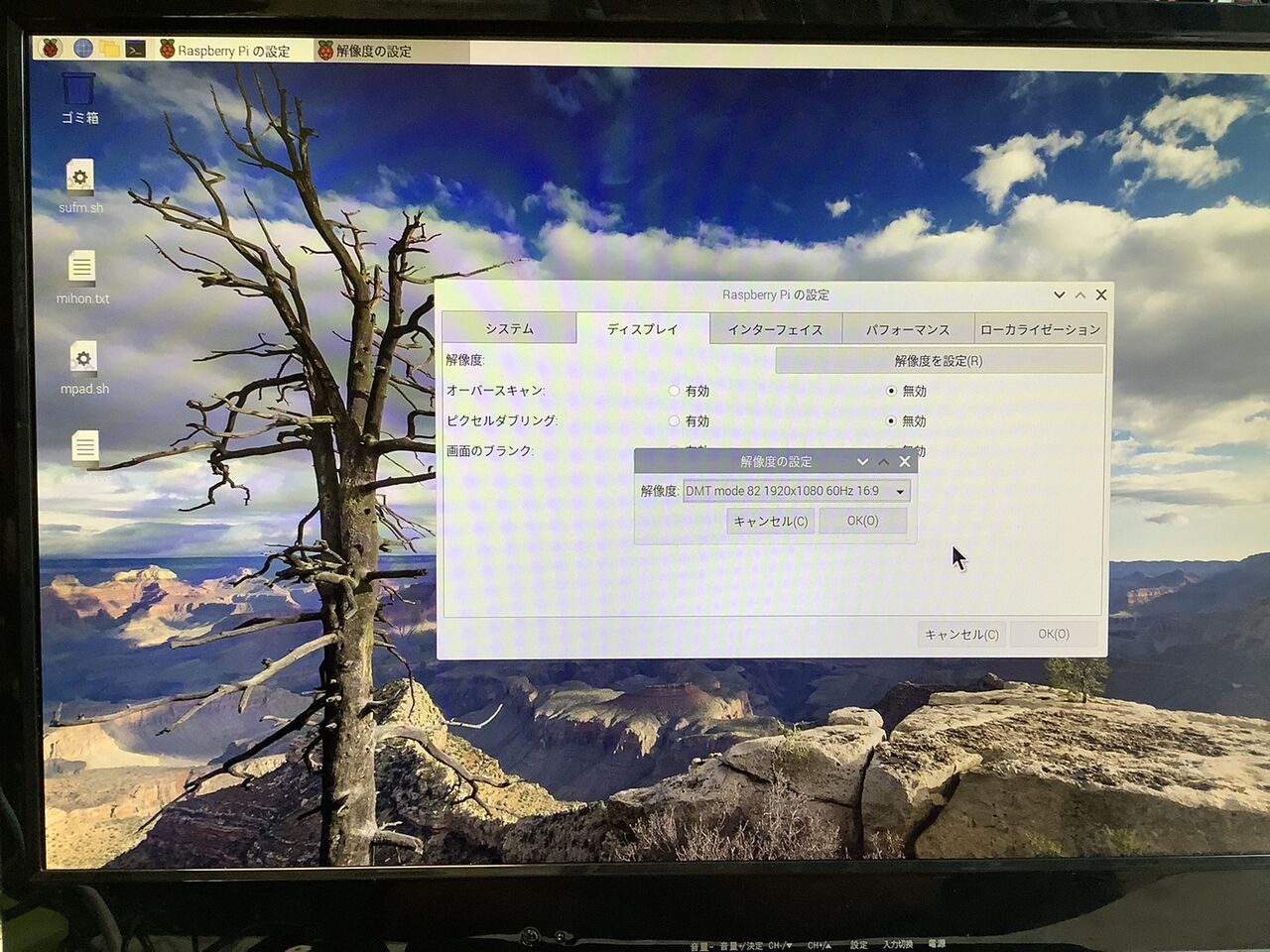
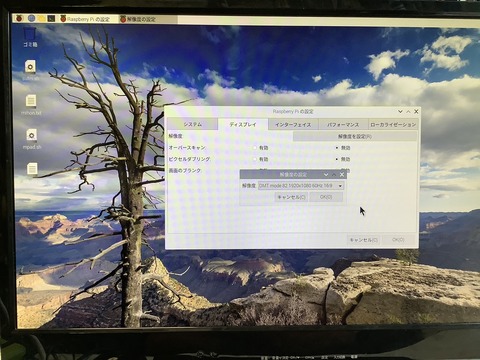
④組み上げ後、ラズパイに接続しHDMIで1920x1080でめでたく表示出来て成功です。
おまけにHDMI出力でちゃんと音声もスピーカーから再生出来ました。
ラズパイ以外でも映像、音声を一本のケーブルで出力出来るようになり上出来です。
以上
①壊れた基板を取り去り新しい基板を取り付けました。

②配線確認のために表・裏の写真を撮りました。


➂基板以外のスピーカー、キースイッチ、インバータ基板、IR受信機、LEDは
TVの物を流用し、組み上げました。
◆キースイッチは、元々のTVの物とパラ接続しました。

④組み上げ後、ラズパイに接続しHDMIで1920x1080でめでたく表示出来て成功です。
おまけにHDMI出力でちゃんと音声もスピーカーから再生出来ました。
ラズパイ以外でも映像、音声を一本のケーブルで出力出来るようになり上出来です。
以上