メカナムホィール 車 に M5StickC を搭載し PS3コントローラ で操作し遊んでみた。
◆ブログ内参考
・I2C Wemos D1 mini Motor Shield を使かってみた
・ESP32 (M5StickC) で PS3 の コントローラ を使う
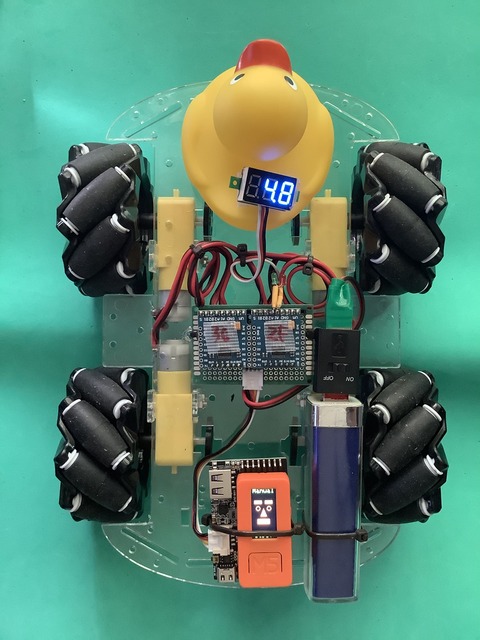
◆全体写真
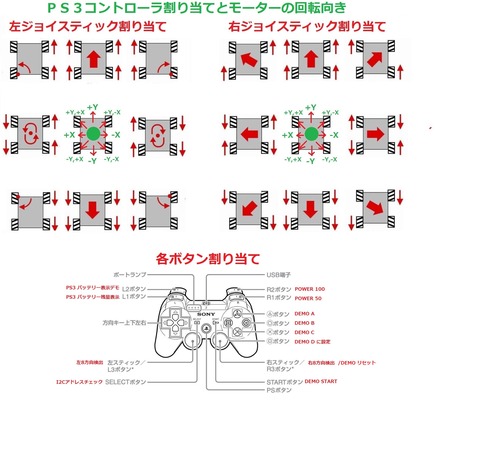
◆メカナムホィールの動きとPS3コントローラの釦割り当て
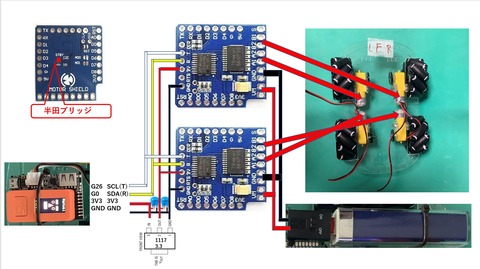
◆配線略図
◆アマゾンで購入
Homyl DIY メカナムホイール 4輪 ロボットカーシャーシ キット STEM知育玩具 Arduino用
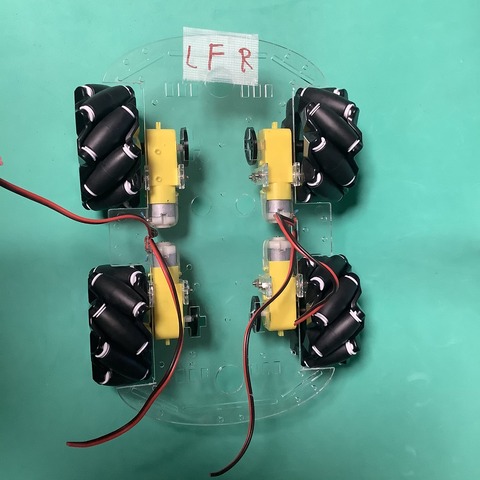
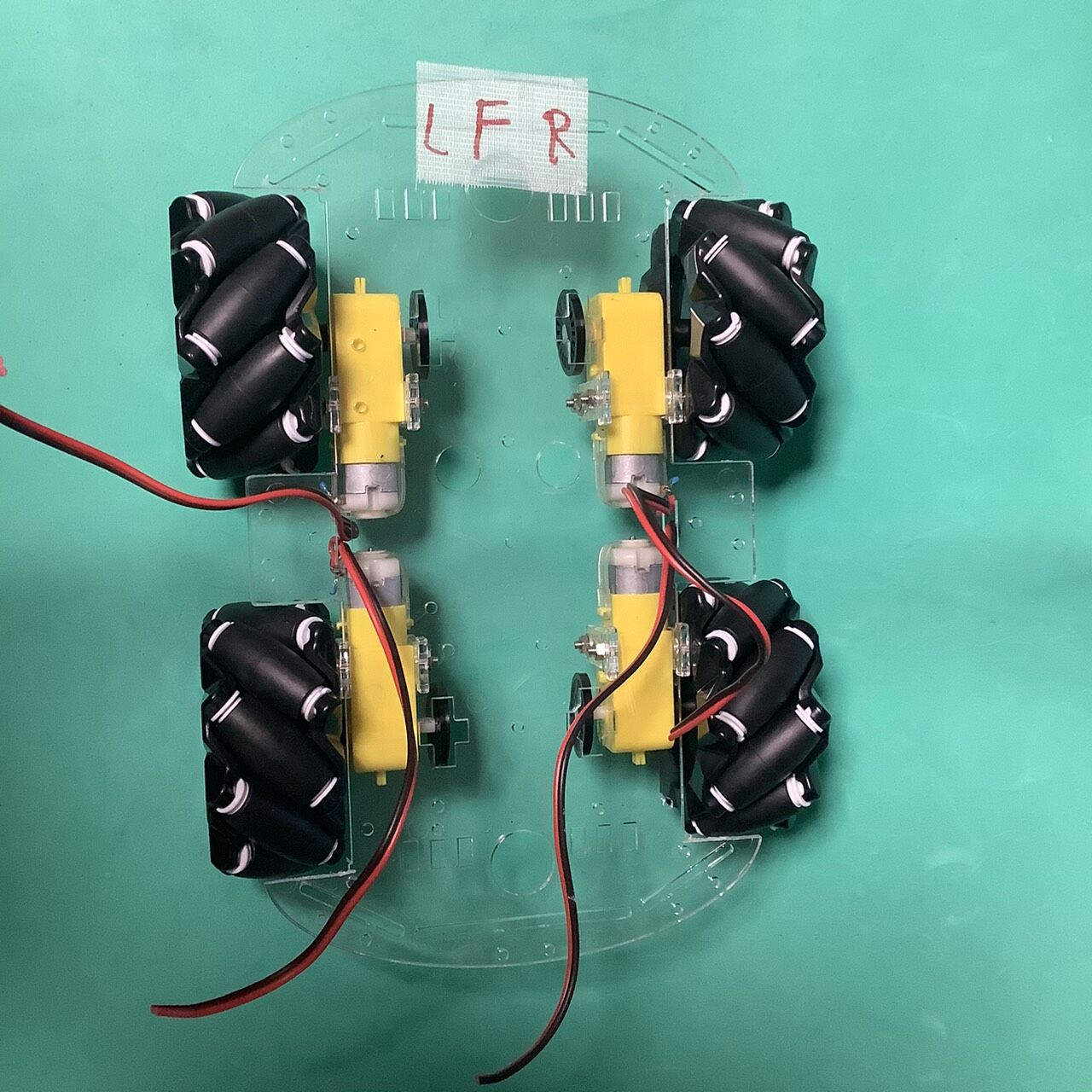
◆メカナムホィールを取り付けた所
◆モーターシールドのI2Cアドレスを表示させた所

◆PS3コントローラのバッテりー残量表示させた所

◆スケッチ例(あくまでも参考です。自己責任で)
◆ブログ内参考
・I2C Wemos D1 mini Motor Shield を使かってみた
・ESP32 (M5StickC) で PS3 の コントローラ を使う
◆全体写真

◆メカナムホィールの動きとPS3コントローラの釦割り当て

◆配線略図

◆アマゾンで購入
Homyl DIY メカナムホイール 4輪 ロボットカーシャーシ キット STEM知育玩具 Arduino用
◆メカナムホィールを取り付けた所
◆モーターシールドのI2Cアドレスを表示させた所

◆PS3コントローラのバッテりー残量表示させた所

◆スケッチ例(あくまでも参考です。自己責任で)
//PS3コントローラ対応
//2020/8/22 メカナムホイール車用に改修
//http://gijin77.blog.jp/archives/26057910.html
#include <Wire.h>
#include <M5StickC.h>
#include <Ps3Controller.h>
#include "WEMOS_Motor.h"
/*
#define _CCW 1
#define _BK 2
#define _STOP 3
#define _STANDBY 4
*/
#define _FD 1
#define _BK 2
#define BTN_A 37
#define BTN_B 39
#define LED 10
// Global Variables
float vBatt, voltAve=3.7;
int bx=10;
int by=80;
int bw=20;
int bh=64;
int stop_flg=0;
int mrx=0;
int mry=0;
int mlx=0;
int mly=0;
int demoflg=0;
int pwr=50;
int xyoff=50;
int ps3bat; //PS3バッテリー残量
//Motor shield default I2C Address: 0x2F,0x30
//PWM frequency: 1000Hz(1kHz)
Motor MFR(0x2F, _MOTOR_A, 1000); //Motor A FR
Motor MFL(0x2F, _MOTOR_B, 1000); //Motor B FL
Motor MBR(0x30, _MOTOR_A, 1000); //Motor A BR
Motor MBL(0x30, _MOTOR_B, 1000); //Motor B BL
void setup() {
pinMode(BTN_A, INPUT);
pinMode(BTN_B, INPUT);
pinMode(LED, OUTPUT);
digitalWrite(LED,HIGH);
Serial.begin(115200);
M5.begin();
Wire.begin(0, 26); //SDA,SCL
Serial.println("プログラム 開始");
Ps3.begin("D8:A0:1D:58:4E:C6");
for (int i=0;i<3;i++){
M5.Lcd.fillScreen(GREEN);
digitalWrite(LED,LOW);delay(250);
M5.Lcd.fillScreen(BLACK);
digitalWrite(LED,HIGH);delay(250);
}
M5.Lcd.setRotation( 0 ); //Mycar = 0
M5.Lcd.setTextFont(1);
M5.Lcd.setTextSize(2);
M5.Lcd.setTextColor(GREEN);
M5.Lcd.setCursor(5,0);M5.Lcd.print("Manual");
dispvbatt();
face();
}
void loop() {
int rx,ry;
int lx,ly;
M5.update();
if ( M5.Axp.GetBtnPress() ) {
// 電源ボタンを押すとパワーオフ
// M5.Axp.pwrerOff();
}
if ( M5.BtnB.wasReleased() ) {
// Bボタンを押すとリスタート
esp_restart();
}
if ( M5.BtnA.wasReleased() ) {
// Aボタンを押すとデモスタート
demo_a();
}
if (Ps3.isConnected()){
dispvbatt();
if (Ps3.data.button.l1){
// Serial.println("l1 ボタン圧下");
ps3bat=Ps3.data.status.battery;
disp3batt(ps3bat);
lcdout(GREEN,"Manual");
delay(200);demoflg=0;
} else if (Ps3.data.button.l2){ //バッテリ表示デモ
// Serial.println("l2 ボタン圧下");
for (int i=1;i<6;i++){
disp3batt(i);
}
disp3batt(0xee);
lcdout(GREEN,"Manual");
delay(200);demoflg=0;
} else if (Ps3.data.button.select ){
// Serial.println("select ボタン圧下");
i2cck();
} else if (Ps3.data.button.triangle){
// Serial.println("triangle ボタン圧下");
lcdout(WHITE,"DEMO A");delay(200);demoflg=1;
} else if (Ps3.data.button.circle){
// Serial.println("circle ボタン圧下");
lcdout(WHITE,"DEMO B");delay(200);demoflg=2;
} else if (Ps3.data.button.cross){
// Serial.println("cross ボタン圧下");
lcdout(WHITE,"DEMO C");delay(200);demoflg=3;
} else if (Ps3.data.button.square){
lcdout(WHITE,"DEMO D");delay(200);demoflg=4;
// Serial.println("square ボタン圧下");
} else if (Ps3.data.button.r3){
// Serial.println("r3 ボタン圧下"); //デモリセット
lcdout(GREEN,"Manual");
delay(200);demoflg=0;
} else if (Ps3.data.button.start){
// Serial.println("start ボタン圧下"); //デモスタート
if (demoflg==1) demo_a();
else if (demoflg==2) demo_b();
else if (demoflg==3) demo_c();
else if (demoflg==4) demo_d();
} else if (Ps3.data.button.r1){
// Serial.println("r1 ボタン圧下");
lcdout(YELLOW,"pwr 50");
pwr=50;delay(200);
} else if (Ps3.data.button.r2){
// Serial.println("r2 ボタン圧下");
lcdout(YELLOW,"pwr100");
pwr=100;delay(200);
}
rx=Ps3.data.analog.stick.rx;
ry=Ps3.data.analog.stick.ry;
lx=Ps3.data.analog.stick.lx;
ly=Ps3.data.analog.stick.ly;
if (abs(rx)<xyoff) rx=0;
if (abs(ry)<xyoff) ry=0;
if (abs(lx)<xyoff) lx=0;
if (abs(ly)<xyoff) ly=0;
rx = map(rx,-128,128,100, -100); // R-JOYSTICK X
ry = map(ry,-128,128,100, -100); // R-JOYSTICK Y
lx = map(lx,-128,128,100, -100); // L-JOYSTICK X
ly = map(ly,-128,128,100, -100); // L-JOYSTICK Y
if ((rx==0)&&(ry==0)&&(lx==0)&&(ly==0)&&(stop_flg==0)) {
stop_flg=1;
drvFR(_STOP,0);
drvBR(_STOP,0);
drvFL(_STOP,0);
drvBL(_STOP,0);
face();
} else if ((mrx != rx)||(mry != ry)||(mlx != lx)||(mly != ly)){
Serial.printf("1 RX=%4d RY=%4d LX=%4d LY=%4d pwrer=%d",rx,ry,lx,ly,pwr);
Serial.println();
stop_flg=0;
BLE_4car(rx,ry,lx,ly);
}
mrx=rx;mry=ry;mlx=lx;mly=ly;
}
delay(100);
}
void i2cck(){
int address;
int error;
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(0, 0);
M5.Lcd.println("I2C scanning");
Serial.println("I2C address scanning");
for(address = 1; address < 127; address++ )
{
Wire.beginTransmission(address);
error = Wire.endTransmission();
if(error==0)
{
M5.Lcd.print(address,HEX);M5.Lcd.print(" ");
Serial.println(address,HEX);
}
else {
M5.Lcd.print(".");
// Serial.println(".");
}
delay(10);
}
Serial.println("End");
delay(3000);
M5.Lcd.setTextSize(2);
M5.Lcd.fillScreen(BLACK);
lcdout(GREEN,"Manual");
}
void BLE_4car(int rx,int ry,int lx,int ly) {
//int pwr=50;
/*
+Y
+X -X
-Y
*/
if ((ry> xyoff)&&(rx==0)) { ff(pwr);Serial.print("ff");}//前進
if ((ry<-xyoff)&&(rx==0)) { bb(pwr);Serial.print("bb");}//後進
if ((rx<-xyoff)&&(ry==0)) { ll(pwr);Serial.print("ll");}//左横移動
if ((rx> xyoff)&&(ry==0)) { rr(pwr);Serial.print("rr");}//右横移動
if ((ry> xyoff)&&(rx> xyoff)) { fr(pwr);Serial.print("fr");}//右前斜め
if ((ry> xyoff)&&(rx<-xyoff)) { fl(pwr);Serial.print("fl");}//左前斜め
if ((ry<-xyoff)&&(rx> xyoff)) { br(pwr);Serial.print("br");}//右後斜め
if ((ry<-xyoff)&&(rx<-xyoff)) { bl(pwr);Serial.print("bl");}//左後斜め
if ((ly> xyoff)&&(lx==0)) { ff(pwr);Serial.print("ff");}//前進
if ((ly<-xyoff)&&(lx==0)) { bb(pwr);Serial.print("bb");}//後進
if ((lx<-xyoff)&&(ly==0)) { rcir(pwr);Serial.print("rcir"); }//右旋回
if ((lx> xyoff)&&(ly==0)) { lcir(pwr);Serial.print("lcir"); }//左旋回
if ((lx<-xyoff)&&(ly> xyoff)) { ftr(pwr);Serial.print("ftr");} //前右折 Turn right
if ((lx> xyoff)&&(ly> xyoff)) { ftl(pwr);Serial.print("ftl"); }//前左折 Turn left
if ((lx<-xyoff)&&(ly<-xyoff)) { btr(pwr);Serial.print("btr"); }//後右折
if ((lx> xyoff)&&(ly<-xyoff)) { btl(pwr);Serial.print("btl"); }//後左折
Serial.println(" --> end ");
}
void drvFR(int fb,int po){
int h;
if (po>bh) h=bh; else h=po;
MFR.setmotor( fb,po);
M5.Lcd.fillRect(bx+30, by-bh-2, 40, bh, BLACK);
if (fb== _BK) {
M5.Lcd.fillRect(bx+50, by-h-2, bw, h, RED);
} else {
M5.Lcd.fillRect(bx+50, by-h-2, bw, h, GREEN);
}
}
void drvFL(int fb,int po){
int h;
if (po>bh) h=bh; else h=po;
MFL.setmotor( fb, po);
M5.Lcd.fillRect(bx-10, by-bh-2, 40, bh, BLACK);
if (fb==_BK) {
M5.Lcd.fillRect(bx, by-h-2, bw, h, RED);
} else {
M5.Lcd.fillRect(bx, by-h-2, bw, h, GREEN);
}
}
void drvBR(int fb,int po){
int h;
if (po>bh) h=bh; else h=po;
MBR.setmotor( fb,po);
M5.Lcd.fillRect(bx+30, by+2, 40, bh, BLACK);
if (fb== _BK) {
M5.Lcd.fillRect(bx+50, by+2, bw, h, RED);
} else {
M5.Lcd.fillRect(bx+50, by+2, bw, h, GREEN);
}
}
void drvBL(int fb,int po){
int h;
if (po>bh) h=bh; else h=po;
MBL.setmotor( fb, po);
M5.Lcd.fillRect(bx-10, by+2, 40, bh, BLACK);
if (fb==_BK) {
M5.Lcd.fillRect(bx, by+2, bw, h, RED);
} else {
M5.Lcd.fillRect(bx, by+2, bw, h, GREEN);
}
}
void ff(int pwr){//前進
drvFR( _FD, pwr);
drvFL( _FD, pwr);
drvBR( _FD, pwr);
drvBL( _FD, pwr);
}
void bb(int pwr){//後進
drvFR( _BK, pwr);
drvFL( _BK, pwr);
drvBR( _BK, pwr);
drvBL( _BK, pwr);
}
void rr(int pwr){//右横移動
drvFR( _BK, pwr);
drvFL( _FD, pwr);
drvBR( _FD, pwr);
drvBL( _BK, pwr);
}
void ll(int pwr){//左横移動
drvFR( _FD, pwr);
drvFL( _BK, pwr);
drvBR( _BK, pwr);
drvBL( _FD, pwr);
}
void fr(int pwr){//右前斜め
drvFR(_STOP,0);
drvFL( _FD, pwr);
drvBR( _FD, pwr);
drvBL(_STOP,0);
}
void fl(int pwr){//左前斜め
drvFR( _FD, pwr);
drvFL(_STOP,0);
drvBR(_STOP,0);
drvBL( _FD, pwr);
}
void br(int pwr){//右後斜め
drvFR( _BK, pwr);
drvFL(_STOP,0);
drvBR(_STOP,0);
drvBL( _BK, pwr);
}
void bl(int pwr){//左後斜め
drvFR(_STOP,0);
drvFL( _BK, pwr);
drvBR( _BK, pwr);
drvBL(_STOP,0);
}
void rcir(int pwr){
drvFR( _BK, pwr);//右旋回
drvFL( _FD, pwr);
drvBR( _BK, pwr);
drvBL( _FD, pwr);
}
void lcir(int pwr){//左旋回
drvFR( _FD, pwr);
drvFL( _BK, pwr);
drvBR( _FD, pwr);
drvBL( _BK, pwr);
}
void ftr(int pwr){//前右折
drvFR(_STOP,0);
drvFL( _FD, pwr);
drvBR(_STOP,0);
drvBL( _FD, pwr);
}
void ftl(int pwr){//前左折
drvFR( _FD, pwr);
drvFL(_STOP,0);
drvBR( _FD, pwr);
drvBL(_STOP,0);
}
void btr(int pwr){//後右折
drvFR(_STOP,0);
drvFL( _BK, pwr);
drvBR(_STOP,0);
drvBL( _BK, pwr);
}
void btl(int pwr){//後左折
drvFR( _BK, pwr);
drvFL(_STOP,0);
drvBR( _BK, pwr);
drvBL(_STOP,0);
}
void mstop(){
drvFR(_STOP,0);
drvFL(_STOP,0);
drvBR(_STOP,0);
drvBL(_STOP,0);
face();
delay(1000);
}
void demo_a(){
int pwr=50;
int wt=1000;
lcdout(GREEN,"DEMO A");
//前進
ff(pwr);delay(wt/2);mstop();
//後進
bb(pwr);delay(wt);mstop();
//前進
ff(pwr);delay(wt/2);mstop();
//右横移動
rr(pwr);delay(wt/2);mstop();
//左横移動
ll(pwr);delay(wt);mstop();
//右横移動
rr(pwr);delay(wt/2);mstop();
//右旋回
rcir(pwr);delay(wt*3);mstop();
//左旋回
lcir(pwr);delay(wt*3);mstop();
//右前斜め
fr(pwr);delay(wt/2);mstop();
//左後斜め
bl(pwr);delay(wt/2);mstop();
//左前斜め
fl(pwr);delay(wt/2);mstop();
//右後斜め
br(pwr);delay(wt/2);mstop();
demoend();
}
void demo_b() {
int pwr=50;
int wt=1000;
lcdout(GREEN,"DEMO B");
//前進
ff(pwr);delay(wt/2);mstop();
//右横移動
rr(pwr);delay(wt/2);mstop();
//後進
bb(pwr);delay(wt);mstop();
//左横移動
ll(pwr);delay(wt);mstop();
//前進
ff(pwr);delay(wt);mstop();
//右横移動
rr(pwr);delay(wt/2);mstop();
//後進
bb(pwr);delay(wt/2);mstop();
demoend();
}
void demo_c(){
int pwr=75;
int wt=700;
lcdout(GREEN,"DEMO C");
//前進
ff(pwr);delay(wt);
//右横移動
rr(pwr);delay(wt);
//後進
bb(pwr);delay(wt);
//左横移動
ll(pwr);delay(wt);
//右横移動
rr(pwr);delay(wt);
//前進
ff(pwr);delay(wt);
//左横移動
ll(pwr);delay(wt);
//後進
bb(pwr);delay(wt);
//右前斜め
fr(pwr);delay(wt/2);
//右旋回
rcir(pwr);delay(wt*3);
//左旋回
lcir(pwr);delay(wt*3);
//左後斜め
bl(pwr);delay(wt/2);
demoend();
}
void demo_d(){
int pwr=75;
int wt=500;
lcdout(GREEN,"DEMO D");
//前進
ff(pwr);delay(wt);
//右横移動
rr(pwr);delay(wt);
//後進
bb(pwr);delay(wt);
//左横移動
ll(pwr);delay(wt);
//右横移動
rr(pwr);delay(wt);
//前進
ff(pwr);delay(wt);
//左横移動
ll(pwr);delay(wt);
//後進
bb(pwr);delay(wt);
//右前斜め
fr(pwr);delay(wt/2);
//右旋回
rcir(pwr);delay(wt*3);
//左旋回
lcir(pwr);delay(wt*3);
//左後斜め
bl(pwr);delay(wt/2);
demoend();
}
void demoend(){
mstop();
lcdout(GREEN,"Manual");
demoflg=0;
}
void lcdout(int col,String msg){
M5.Lcd.fillRect(0,0,79,32, BLACK);
M5.Lcd.setCursor(5, 0);
M5.Lcd.setTextColor(col);
M5.Lcd.print(msg);
}
void face(){
int x0=10;
int y0=40;
int w0=25;
int h0=10;
int col=TFT_ORANGE;
M5.Lcd.fillRect(x0,y0,w0,h0,col);
M5.Lcd.fillRect(x0+35,y0,w0,h0,col);
M5.Lcd.fillCircle(x0+12,y0+25, 7,col);
M5.Lcd.fillCircle(x0+12,y0+25, 5,BLACK);
M5.Lcd.fillCircle(x0+48,y0+25, 7,col);
M5.Lcd.fillCircle(x0+48,y0+25, 5,BLACK);
M5.Lcd.fillTriangle(x0+30,y0+25, 30,90,50,90,col);
M5.Lcd.fillRect(20,y0+60,40,15,col);
}
void dispvbatt(){
vBatt= M5.Axp.GetVbatData() * 1.1 / 1000;
M5.Lcd.fillRect(0,145,79,32, BLACK);
M5.Lcd.setCursor(10,145);
if (vBatt > voltAve) {
M5.Lcd.setTextColor(GREEN);
} else{
M5.Lcd.setTextColor(RED);
}
M5.Lcd.printf("%4.2fv ", vBatt);
}
void disp3batt(int p3bt){
int x0=20;
int y0=30;
int w0=40;
int h0=120;
int y1=22;
int x1,w1;
int i;
// M5.Lcd.fillRect(0,y0,79,h0,BLACK);
M5.Lcd.fillScreen(BLACK);
dispvbatt();
lcdout(GREEN,"PS3Bat");
x1=x0+1;w1=w0-2;
if (p3bt==0xEE) {
for(int j=0;j<6;j++){
M5.Lcd.fillRect(x1,y0,w1,y1*5,GREEN);
for(i=0;i<5;i++){
M5.Lcd.drawRect(x0,y0+y1*i,w0,20,WHITE);
}
delay(500);
M5.Lcd.fillRect(x1,y0,w1,y1*5,BLACK);
for(i=0;i<5;i++){
M5.Lcd.drawRect(x0,y0+y1*i,w0,20,WHITE);
}
delay(500);
}
M5.Lcd.fillScreen(BLACK);
return;
}
i=5-p3bt;
switch(p3bt){
case 1:
M5.Lcd.fillRect(x1,y0+y1*i,w1,20,RED);
break;
case 2:
M5.Lcd.fillRect(x1,y0+y1*i,w1,y1*p3bt,YELLOW);
break;
case 3:
M5.Lcd.fillRect(x1,y0+y1*i,w1,y1*p3bt,YELLOW);
break;
case 4:
M5.Lcd.fillRect(x1,y0+y1*i,w1,y1*p3bt,GREEN);
break;
case 5:
M5.Lcd.fillRect(x1,y0+y1*i,w1,y1*p3bt,GREEN);
break;
}
for(i=0;i<5;i++){
M5.Lcd.drawRect(x0,y0+y1*i,w0,20,WHITE);
}
delay(3000);
// M5.Lcd.fillRect(0,y0,79,h0,BLACK);
M5.Lcd.fillScreen(BLACK);
}

コメント